|
Учебное пособие: Основные понятия и планирование экспериментаУчебное пособие: Основные понятия и планирование экспериментаЛекция 1. Вводная. Основные понятия и определения Под экспериментом будем понимать совокупность операций совершаемых над объектом исследования с целью получения информации о его свойствах. Эксперимент, в котором исследователь по своему усмотрению может изменять условия его проведения, называется активным экспериментом. Если исследователь не может самостоятельно изменять условия его проведения, а лишь регистрирует их, то это пассивный эксперимент. Важнейшей задачей методов обработки полученной в ходе эксперимента информации является задача построения математической модели изучаемого явления, процесса, объекта. Ее можно использовать и при анализе процессов и при проектировании объектов. Можно получить хорошо аппроксимирующую математическую модель, если целенаправленно применяется активный эксперимент. Другой задачей обработки полученной в ходе эксперимента информации является задача оптимизации, т.е. нахождения такой комбинации влияющих независимых переменных, при которой выбранный показатель оптимальности принимает экстремальное значение. Опыт – это отдельная экспериментальная часть. План эксперимента совокупность данных определяющих число, условия и порядок проведения опытов. Планирование эксперимента выбор плана эксперимента, удовлетворяющего заданным требованиям, совокупность действий направленных на разработку стратегии экспериментирования (от получения априорной информации до получения работоспособной математической модели или определения оптимальных условий). Это целенаправленное управление экспериментом, реализуемое в условиях неполного знания механизма изучаемого явления. В процессе измерений, последующей обработки данных, а также формализации результатов в виде математической модели, возникают погрешности и теряется часть информации, содержащейся в исходных данных. Применение методов планирования эксперимента позволяет определить погрешность математической модели и судить о ее адекватности. Если точность модели оказывается недостаточной, то применение методов планирования эксперимента позволяет модернизировать математическую модель с проведением дополнительных опытов без потери предыдущей информации и с минимальными затратами. Цель планирования эксперимента – нахождение таких условий и правил проведения опытов при которых удается получить надежную и достоверную информацию об объекте с наименьшей затратой труда, а также представить эту информацию в компактной и удобной форме с количественной оценкой точности. Пусть интересующее нас свойство (Y) объекта зависит от нескольких (n) независимых переменных (Х1, Х2, , Хn) и мы хотим выяснить характер этой зависимости - Y=F(Х1, Х2, …, Хn), о которой мы имеем лишь общее представление. Величина Y – называется “отклик”, а сама зависимость Y=F(Х1,Х2, …, Хn) – “функция отклика”. Отклик должен быть определен количественно. Однако могут встречаться и качественные признаки Y. В этом случае возможно применение рангового подхода. Пример рангового подхода - оценка на экзамене, когда одним числом оценивается сложный комплекс полученных сведений о знаниях студента. Независимые переменные Х1, Х2, …, Хn – иначе факторы, также должны иметь количественную оценку. Если используются качественные факторы, то каждому их уровню должно быть присвоено какое-либо число. Важно выбирать в качестве факторов лишь независимые переменные, т.е. только те которые можно изменять, не затрагивая другие факторы. Факторы должны быть однозначными. Для построения эффективной математической модели целесообразно провести предварительный анализ значимости факторов (степени влияния на функцию), их ранжирование и исключить малозначащие факторы. Диапазоны изменения факторов задают область определения Y. Если принять, что каждому фактору соответствует координатная ось, то полученное пространство называется факторным пространством. При n=2 область определения Y представляется собой прямоугольник, при n=3 – куб, при n >3 - гиперкуб. При выборе диапазонов изменения факторов нужно учитывать их совместимость, т.е. контролировать, чтобы в этих диапазонах любые сочетания факторов были бы реализуемы в опытах и не приводили бы к абсурду. Для каждого из факторов указывают граничные значения
Регрессионный анализ функции отклика предназначен для получения ее математической модели в виде уравнения регрессии
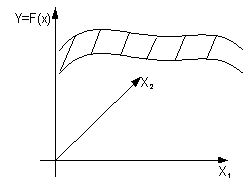
где В1, …, Вm – некоторые коэффициенты; е – погрешность. Среди основных методов планирования, применяемых на разных этапах исследования, используют: планирование отсеивающего эксперимента, основное значение которого выделение из всей совокупности факторов группы существенных факторов, подлежащих дальнейшему детальному изучению; планирование эксперимента для дисперсионного анализа, т.е. составление планов для объектов с качественными факторами; планирование регрессионного эксперимента, позволяющего получать регрессионные модели (полиномиальные и иные); планирование экстремального эксперимента, в котором главная задача – экспериментальная оптимизация объекта исследования; планирование при изучении динамических процессов и т.д. Инициатором применения планирования эксперимента является Рональд А. Фишер, другой автор известных первых работ – Френк Йетс. Далее идеи планирования эксперимента формировались в трудах Дж. Бокса, Дж. Кифера. В нашей стране - в трудах Г.К. Круга, Е.В. Маркова и др. В настоящее время методы планирования эксперимента заложены в специализированных пакетах, широко представленных на рынке программных продуктов, например: StatGrapfics, Statistica, SPSS, SYSTAT и др. Представление результатов экспериментов При использовании методов планирования эксперимента необходимо найти ответы на 4 вопроса: Какие сочетания факторов и сколько таких сочетаний необходимо взять для определения функции отклика? Как найти коэффициенты В0, В1, …, Bm? Как оценить точность представления функции отклика? Как использовать полученное представление для поиска оптимальных значений Y? Геометрическое представление функции отклика в факторном пространстве Х1, Х2, …, Хn называется поверхностью отклика (рис. 1).
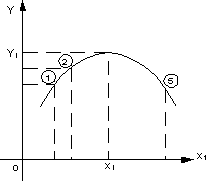
Рис. 1. Поверхность отклика Если исследуется влияние на Y лишь одного фактора Х1, то нахождение функции отклика - достаточно простая задача. Задавшись несколькими значениями этого фактора, в результате опытов получаем соответствующие значения Y и график Y =F(X) (рис. 2).
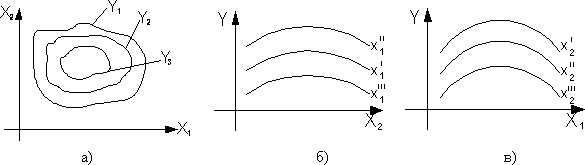
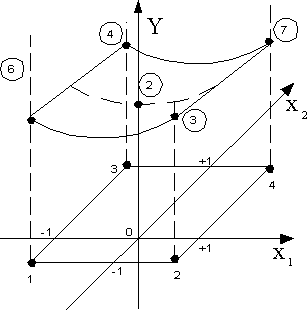
Рис. 2. Построение функции отклика одной переменной по опытным данным По его виду можно подобрать математическое выражение функции отклика. Если мы не уверены, что опыты хорошо воспроизводятся, то обычно опыты повторяют несколько раз и получают зависимость с учетом разброса опытных данных. Если факторов два, то необходимо провести опыты при разных соотношениях этих факторов. Полученную функцию отклика в 3х-мерном пространстве (рис. 1) можно анализировать, проводя ряд сечений с фиксированными значениями одного из факторов (рис. 3). Вычлененные графики сечений можно аппроксимировать совокупностью математических выражений.
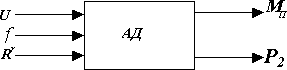
Рис. 3. Сечения поверхности отклика при фиксированных откликах (а) и переменных (б,в). При трех и более факторах задача становится практически неразрешимой. Если и будут найдены решения, то использовать совокупность выражений достаточно трудно, а часто и не реально. Например, пусть необходимо исследовать влияние U, f и Rr на Мп и P2 асинхронного двигателя (АД) (рис. 4).
Рис. 4. Исследование влияния U, f и Rr на Мп и P2 АД Если в диапазоне изменения каждого фактора взять хотя бы по пять точек
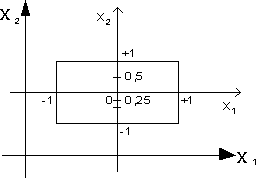
то для того чтобы выполнить опыты при всех возможных сочетаниях значений факторов (их три) необходимо выполнить 53=125 опытов и сформировать по 52=25 кривых для каждой из двух функций отклика. Если мы хотим хотя бы продублировать опыты чтобы снизить погрешность, то число опытов пропорционально возрастает, поэтому произвольное выполнение опытов при числе факторов более двух и использование их результатов - практически нереально. Лекция 2. Разложение функции отклика в степенной ряд, кодирование факторов Если заранее не известно аналитическое выражение функции отклика, то можно рассматривать не саму функцию, а ее разложение, например в степенной ряд в виде полинома Y=В0 + B1Х1 + … + BnХn + В12Х1Х2 + … Вnn-1ХnХn-1 + В11Х12 + … + ВnnXn2 +…. Разложение в степенной ряд функции возможно в том случае, если сама функция является непрерывной и гладкой. На практике обычно ограничиваются числом членов степенного ряда и аппроксимируют функцию полиномом некоторой степени. Факторы могут иметь разные размерности (А, В, Вт, об/мин) и резко отличаться количественно. В теории планирования эксперимента используют кодирование факторов.
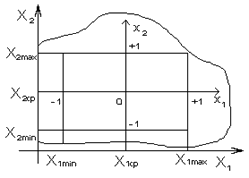
Рис. 5. Пространство кодированных факторов Эта операция заключается в выборе нового масштаба для кодированных факторов (рис. 5), причем такого, чтобы минимальное значение кодированных факторов соответствовало “-1”, а максимальное значение “+1”, а также в переносе начала координат в точку с координатами Х1ср, Х2ср, …, Хnср
Текущее значение кодированного фактора
где Хi – именованное (абсолютное) значение фактора; xi – кодированное значение фактора; Xicp -Ximin =Ximax-Xicp - интервал варьирования фактора. Граница совместимости факторов указана на рис. 5 в виде кривой линии. Если фактор изменяется дискретно, например он является качественным, то каждому уровню этого кодированного фактора присваиваются числа в диапазоне от +1 до –1. Так при двух уровнях это +1 и –1, при трех уровнях +1, 0, -1 и т.д. Функция отклика может быть выражена через кодированные факторы Y=f(x1,…, хn) и записана в полиномиальном виде Y=b0+b1х1+b2х2+…+bnхn+b12х1х2+…+bnn-1хn-1хn+b11х12+ +bnnхn2+…. Очевидно, что Y=F(X1,…, Xi,…, Xn) = f(x1,… xi,…, хn). Для полинома, записанного в кодированных факторах, степень влияния факторов или их сочетаний на функцию отклика определяется величиной их коэффициента bi. Для полинома в именованных факторах величина коэффициента Вi еще не говорит однозначно о степени влияния этого фактора или их сочетаний на функцию отклика. Степенной вид полинома может быть записан в более компактной форме
При определении общего
числа членов степенного ряда количество парных сочетаний для n факторов в
полиноме, тройных сочетаний, i-ных сочетаний
Например, для набора четырех чисел (n=4) - 1, 2, 3, 4 число тройных сочетаний составляет
Если считать, что существует фактор х0 всегда равный 1, то
Если дополнительно все двойные, тройные и т.д. сочетания факторов, а также квадраты факторов и все соответствующие им коэффициенты обозначить через хi и bi, для i=n+1, …, m, то степенной ряд можно записать в виде
Здесь m+1 общее число рассматриваемых членов степенного ряда. Для линейного полинома с учетом всех возможных сочетаний факторов
Полный квадратичный полином выглядит следующим образом:
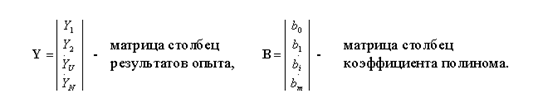
где х0=1, х3=х1х2, х4=х12, х5=х22, b3=b12, b4=b11, b5=b22. Матричные преобразования при обработке результатов эксперимента При матричной записи
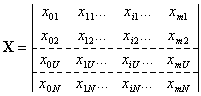
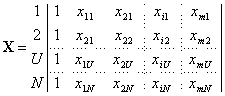
результатов различных N опытов для полиномиального представления результата
N строк m+1 столбец Здесь 0,1, …,i,…, m номера членов уравнения; 1,…,U,…,N … – номера опытов. Матрица Х - прямоугольная, содержащая m + 1 столбец и N строк. Если учесть, что в
матрице Х элементы
Домножим левую и правую часть этого уравнения на одну и туже матрицу Xt – транспонированную матрицу Х
Транспонированная матрица это матрица, у которой по отношению к исходной столбцы и строки поменяны местами.
N столбцов
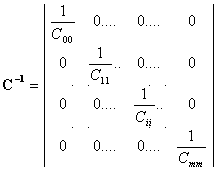
Для того чтобы получить в общем виде матрицу-столбец коэффициентов В необходимо домножить обе части последнего матричного уравнения слева на матрицу С-1 – матрицу обратную матрице С.
Обратная матрица строится так (используется процедура обращения матрицы), что при умножении ее на исходную матрицу получается единичная матрица – Е, у которой на главной диагонали расположены 1, а вне ее - 0.
Окончательно в общем виде матрица-столбец коэффициентов полинома
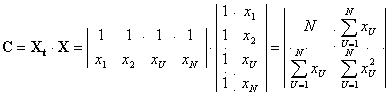
Рассмотрим в качестве простого примера полином в виде
формируемого по результатам N опытов.
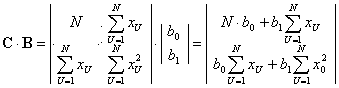
Откуда решение системы относительно коэффициентов b0 и b1
Этот результат полностью совпадает с соотношениями для такого же полинома при использовании метода наименьших квадрантов, где используется численный показатель минимальности суммы квадрантов отклонений во всех N опытах. Следовательно, построенный таким образом полином будет проходить самым ближайшим образом к результатам эксперимента. Лекция 3. Ортогональное планирование эксперимента Структура матрицы С играет важную роль в реализации алгоритма определения коэффициентов аппроксимирующего полинома. Структура матрицы С зависит от выбора значений факторов в N опытах. Поэтому желательно особым образом выбирать значения факторов в опытах. Элемент Сii на главной диагонали матрицы С (i-тая строка, i-тый столбец) представляется суммой квадратов значений i-того столбца сочетаний факторов матрицы Х в N опытах
Элементы матрицы симметрично расположенные относительно главной диагонали равны между собой, то есть матрица С - симметричная.
где первый индекс указывает номер столбца матрицы Х, второй индекс - номер строки. При этом
Чтобы существовала матрица С-1, матрица С размера (1+m; 1+m) должна быть невырожденной, то есть ее определитель должен быть отличен от нуля. Это условие выполняется, если все m+1 столбцов матрицы Х линейно независимы. Кроме того, необходимо, чтобы число различных сочетаний факторов в матрице Х (число опытов N) должно быть не меньше чем m+1. Это условие исходит из того, что для определения m+1 коэффициента полинома необходимо не менее m+1 уравнений (опытов). Полученные коэффициенты B позволяют сформировать уравнение функции отклика при m+1 членах уравнения. Если точность этого уравнения оказалась недостаточной, то требуется взять уравнение с большим числом членов и начать все заново так как все коэффициенты B оказываются зависимыми друг от друга. Это возникает при использовании пассивного эксперимента. Однако если целенаправленно использовать активный эксперимент и особым образом построить матрицу сочетаний факторов в опытах Х, использовать планирование эксперимента, то коэффициенты полинома определяются независимо друг от друга. Стратегия применения планов заключается в принципе постепенного планирования – постепенного усложнения модели. Начинают с простейшей модели, находятся для нее коэффициенты, определяется ее точность. Если точность не удовлетворяет, то планирование и модель постепенно усложняются. Задача планирования заключается в том как нужно строить матрицу Х, чтобы матрица С легко обращалась и коэффициенты B определялись независимо друг от друга. Эти требования выполняется если матрица С является диагональной, то есть все элементы расположенные не на главной диагонали матрицы равны нулю
или
Тогда обратная матрица определяется как
В этом случае система уравнений распадается на m+1 независимых уравнения и коэффициенты полинома определяются как
Если учесть, что Сii определяется как сумма квадратов значений факторов
то коэффициенты определяются как
Требование выполнения
условия
где i, j - номера
столбцов в матрице Х; Каждый столбец матрицы Х можно представить в виде вектора
если то это означает, что скалярное произведение двух векторов Хi и Хj равняется нулю, то есть векторы Хi и Хj - ортогональны. Так как любое скалярное произведение двух различных столбцов в матрице Х должно быть равно нулю, то это условие называется условием ортогональности матрицы Х, а соответствующее планирование эксперимента (определение сочетаний факторов) называется ортогональным планированием. Для ортогонального
планирования при учете того что
Таким образом, при ортогональном планировании сумма элементов любого столбца матрицы Х, кроме первого столбца должно быть равна нулю. Это правило используется при построении плана эксперимента, то есть при определении каким образом нужно менять значения факторов в опытах. Это правило показывает, что в ортогональном планировании при четном числе уровней, на которых фиксируется каждый фактор, то эти уровни должны быть симметрично расположены относительно центральной точки х=0, при нечетном числе уровней должна использоваться и центральная точка (рис.6). Кроме свойства ортогональности план может обладать свойствам насыщенности, рототабельности и др. План является насыщенным, если общее число опытов N равняется числу неизвестных коэффициентов полинома m+1.
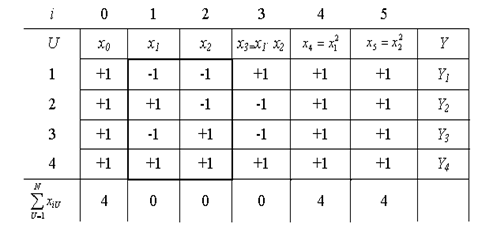
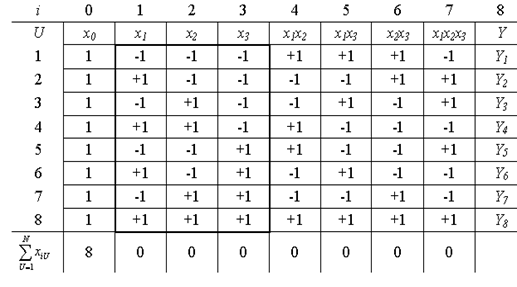
Рис. 6. Выбор уровней варьирования при ортогональном планировании План называется рототабельным, если дисперсия отклика одинакова на одном расстоянии от центра плана при любом направлении в факторном пространстве. В упрощенном виде это означает, что все точки плана лежат на окружности (сфере, гиперсфере). Лекция 4. Планы полного факторного эксперимента 2n (планы ПФЭ 2n) Планы ПФЭ 2n являются простейшими планами первого порядка. Основание 2 означает, что принято два уровня варьирования, на которых фиксируются факторы. n – число факторов. Для плана ПФЭ 22 число факторов равно двум (n=2) и число уровней фиксирования факторов также 2. Значения кодированных факторов выбираются в виде +1 и –1. Полное число возможных сочетаний значений n факторов (число опытов, а значит и число строк плана) N=22=4. Составляется план, в котором число столбцов факторов и их сочетаний равняется числу членов уравнения. Так для уравнения
План ПФЭ 22 для этого уравнения представляется в следующем виде
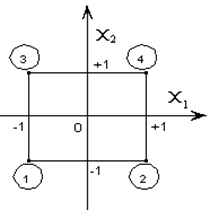
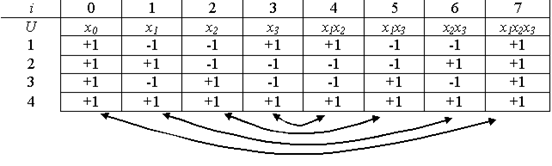
В первый столбец (i=0) во все четыре ячейки заносятся +1. Во второй столбец (i=1) заносятся единицы с чередующими знаками (начинаем с -1). В этом случае сумма элемента столбца равняется нулю. Третий столбец заполняем единицами с чередующимися через 2 элемента знаками. Сумма элементов также равняется нулю. Геометрическое отображение плана ПФЭ 22 с указанием номеров точек плана в факторном пространстве представлено на рис. 7. Точки плана располагаются в вершинах квадрата.
Рис. 7. Геометрическое отображение плана ПФЭ 22 в факторном пространстве Элементы столбцов соответствующих произведениям факторов получаются путем перемножения элементов предыдущих столбцов. Такое правило позволяет гарантировать, что мы не пропустили ни одного возможного сочетания факторов в опытах и в то же время не будет повторений одинаковых сочетаний. Последние два столбца факторов, соответствующие квадратам факторов, состоят только из +1. Столбцы, обведенные утолщенной рамкой, образуют план эксперимента. Столбец х1х2, не обведенный утолщенной рамкой, при проведении опытов носит вспомогательный характер. Особенности плана ПФЭ 22: 1. Различных столбцов в таблице получилось лишь четыре. Столбцы, соответствующие квадратам факторов неотличимы от столбца х0 - это общий результат для плана ПФЭ 2n. Это не позволяет определить отдельно коэффициенты при квадратах факторов. Поэтому планы ПФЭ 2n называют планами первого порядка. Для определения коэффициентов при квадратах факторов используют планы второго порядка. В дальнейшем в планах ПФЭ 2n столбцы квадратов факторов изображаться не будут. 2. Число различных столбцов равняется числу различных сочетаний факторов, то есть числу строк плана - числу опытов N. Это тоже общий результат для этих планов, то есть с помощью планов ПФЭ 2n можно определить все коэффициенты линейного полинома со всеми возможными сочетаниями факторов, включая коэффициенты b12…n , отражающие максимальное взаимодействие факторов вида х1х2…хn. 3. В плане ПФЭ 22 сумма квадратов элементов любого столбца
Поэтому для планов ПФЭ 2n
Таким образом, с помощью
планов ПФЭ 2n можно определить свободный член уравнения b0,
План ПФЭ 2n может являться
насыщенным, при выборе числа членов уравнения m+1=N, ненасыщенным, при выборе
числа членов уравнения и соответственно числа столбцов плана m+1<N . План
ПФЭ 2n является также рототабельным, так как все точки плана лежат на
окружности (сфере, гиперсфере) с радиусом Для плана ПФЭ 23 число факторов n = 3. Выполняется N = 23 = 8 опытов. Уравнение может содержать до восьми членов
Таким образом формируется план из восьми строк и восемь столбцов. В четвертом столбце (i=3) записываются единицы с чередующимися знаками через четыре элемента. План составляется аналогичным образом плану ПФЭ 22.
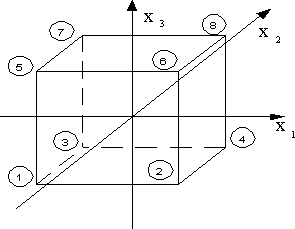
Столбцы, обведенные утолщенной рамкой, образуют план эксперимента. Столбцы, не обведенные утолщенной рамкой, при проведении опытов носят вспомогательный характер. Геометрическое отображение плана ПФЭ 23 с указанием номеров точек плана в факторном пространстве представлено на рис. 8. Точки плана располагаются в вершинах куба.
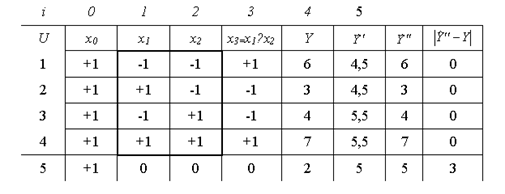
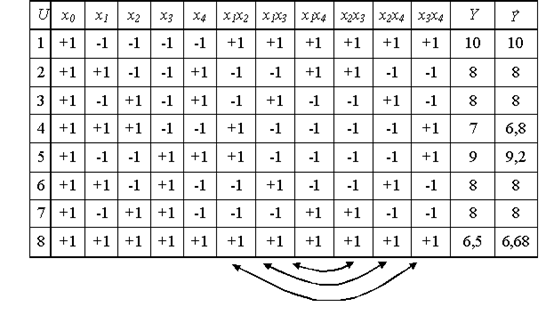
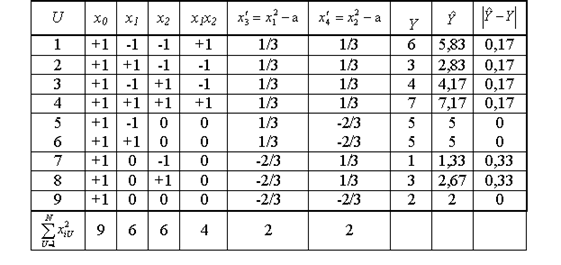
Рис. 8. Геометрическое отображение плана ПФЭ 23 в факторном пространстве Пример применения плана ПФЭ 22. Пусть в результате проведения экспериментов по плану ПФЭ 22, то есть при изменении двух факторов, мы получили опытные значения Y1, Y2, Y3, Y4. Поверхность, уравнение которой нас интересует, имеет вид рис. 9.
Рис. 9. Поверхность функции отклика Составляем план ПФЭ 22.
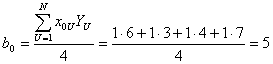
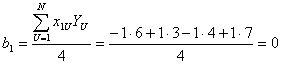
Вначале найдем коэффициенты сокращенного линейного полинома вида
и результаты вычислений Рассчитываем коэффициенты полинома.
Полином имеет вид
Результаты расчета по
нему приведены в соответствующем столбце плана. Наблюдаются расхождения между Y
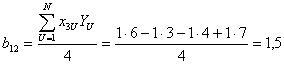
и При этом ранее определенные коэффициенты остаются без изменений. Определим коэффициент при дополнительном члене полинома
Полином имеет вид
Результаты расчета по
нему приведены в соответствующем столбце плана. Наблюдаются расхождения между Y
и
При этом ранее определенные коэффициенты остаются без изменений. Определим коэффициент при дополнительном члене полинома
Полином имеет вид
По нему рассчитываем
предсказанные значения отклика в точках плана (столбец Лекция 5. Планы дробного факторного эксперимента (планы ДФЭ) При многофакторном эксперименте, особенно когда число факторов больше шести (n > 6), число опытов планов ПФЭ 2n (N = 2n) становится чрезмерным. Если нам не требуется определение всех коэффициентов неполного квадратичного полинома, то переходят к дробному факторному эксперименту (ДФЭ) – части полного факторного эксперимента. Так, например, если требуется определить лишь коэффициенты при самих факторах
то план ПФЭ 2n дает
избыточную информацию. Так при Хотя эта избыточная информация не является бесполезной, она позволяет более точно определить коэффициенты, но все же часто используют планы ДФЭ 2n-k , где k – показатель дробности плана ПФЭ. При k = 1 число опытов в плане ДФЭ в два раза меньше, чем в плане ПФЭ, поэтому такие планы называют полуреплика плана ПФЭ. Так при k=1 для плана ДФЭ 26-1 N =26-1 = 32, при k=2 для плана ДФЭ 26-2 N =26-2 = 16 и такой план называют четвертьрепликой, при k=3 для плана ДФЭ 26-3 N =26-3 = 8. При выборе дробности плана k необходимо учитывать, что число опытов должно быть больше числа членов уравнения. В рассматриваемом случае величина k должна быть такой, что бы удовлетворялось условие
План ДФЭ строится, как и для плана ПФЭ, но с меньшим числом факторов. Оставшиеся факторы варьируются не произвольно, а так чтобы сохранялась ортогональность плана. Это обеспечивается, если оставшиеся факторы варьируются по выбранному генерирующему соотношению, например как произведение каких-либо факторов из первой группы. Но это приводит к тому, что в матрице Х будут существовать одинаковые столбцы. Следовательно, мы не сможем найти в чистом виде все коэффициенты неполного квадратичного полинома, а лишь определим совместную величину коэффициентов для одинаковых столбцов. Рассмотрим построение
плана ДФЭ 23-1 . Здесь n = 3, к =1, N=23-1=4. Первые два фактора варьируем как
и ранее для плана ПФЭ 22, а для третьего фактора выбираем генерирующее
соотношение в виде Для неполного квадратичного полинома количество столбцов плана составляет восемь.
План является ортогональным, но в нем оказались четыре пары одинаковых столбцов. Поэтому можно определить только четыре коэффициента, отражающие совместные влияния двух одинаковых столбцов
Суммарные значения
коэффициентов
Если можно допустить, что коэффициенты из их смешанной оценки сопоставимы, то для рассмотренного плана
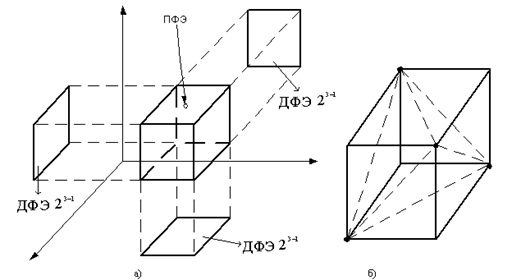
Графическое изображение планов ПФЭ 23 и ДФЭ 23-1 в факторном пространстве (для трех факторов - трехмерное пространство) представлено на рис. 10. План ПФЭ 23 представлен кубом с восемью узлами (точками плана), а возможные планы ДФЭ 23-1 – проекциями этого куба на три плоскости. То есть из восьми узлов выбираются четыре (рис. 10, а). Из куба можно также выбрать четыре точки из восьми, не лежащие в одной плоскости, и сформировать план ДФЭ 23-1 (рис. 10, б).
Рис. 10. Графическое изображение планов ПФЭ 23 и ДФЭ 23-1 в факторном пространстве Планы ДФЭ, как и планы ПФЭ, являются рототабельными. Планы ДФЭ могут быть как насыщенными так и ненасыщенными. Достоинство планов ДФЭ заключается и в том, что если построенный на его основе неполный полином не удовлетворяет требованиям по точности, то план ДФЭ легко достраиваются до плана ПФЭ, без потери информации прежних опытах, с формированием более точного полинома. Пример построения плана ДФЭ. Построить план ДФЭ 24-1 и определить полином
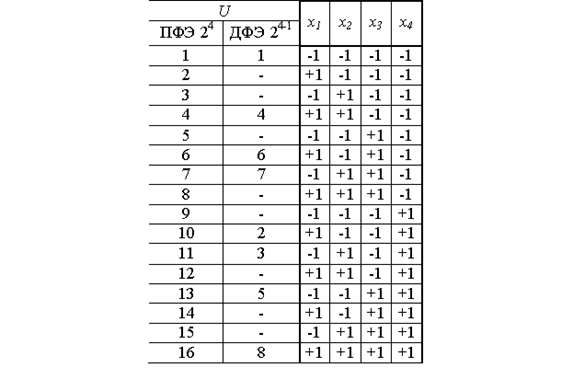
Число факторов – 4. Нужно найти 8 коэффициентов полинома. Выбираем 8 из 16 опытов плана ПФЭ 24 таким образом, чтобы были определены независимые коэффициенты при самих факторах, смешанные коэффициенты при парных сочетаниях факторов и в пренебрежении тройными и четверным сочетаниями факторов и при этом сохранялась ортогональность плана.
Такой выбор позволяет сформировать план ДФЭ 24-1 как и план ПФЭ 23 , но с х4=х1х2х3 . План ДФЭ 24-1 представляется в виде
Значения коэффициентов полинома составляют:
Если принять, что
то полином имеет вид
Значения полинома в точках плана приведены в последнем столбце плана ДФЭ 24-1. В нашем случае точность его достаточно высокая. Лекция 6. Насыщенные планы первого порядка Насыщенным планом первого порядка – называется план, содержащий n+1 точку (опыт). Например, при n = 4, N=n + 1 = 5. То есть полином формируется в виде
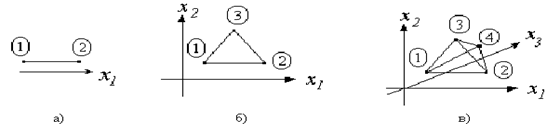
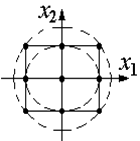
Таким образом, насыщенный план – это предельно минимальный случай плана ДФЭ. Такие планы называются симплекс-планы. Для симплекс-плана при n = 1 N = 2 его геометрическое изображение представлено на рис. 11, а; при n=2, N=3 – на рис. 11, б; при n=3, N=4 – на рис. 11, в. Симплекс-планы обычно используются на стадии предварительного исследования.
Рис. 11. Симплекс-план для n=1, N=2 (а); n=2, N=3 (б); n=3, N=4 (в) Симплекс-план не всегда является ортогональным. Симплекс-план называется правильным, если расстояние между двумя любыми точками плана одинаковое. Симплекс-план называется центрированным, если
для i=1, 2, …, n . Применимость планов ПФЭ и пути повышения точности полиномов. По каким же признакам можно судить о допустимости использования неполного квадратичного полинома, построенного на основе планов ПФЭ 2n? Такие полиномы дают поверхность отклика, которая проходит точно через все экспериментальные точки, по которым определяются коэффициенты. Так как точки планов ПФЭ располагаются на границах диапазонов варьирования факторов, то это означает, что поверхность отклика проходит через граничные точки. В любом сечении поверхности отклика, полученной по такому полиному, плоскостью при фиксированных всех факторах кроме одного и параллельной оси Y получается след в виде прямой линии. Возможны случаи, когда
реальная поверхность отклика определяется полиномами второго и выше порядков В
этом случае поверхность плана ПФЭ, совпадая с реальной поверхностью в граничных
точках, может отличаться в других точках факторного пространства, например в
центральной точке плана, т.е. Однако при многофакторном
эксперименте возможны случаи, когда в реальности функция отклика зависит, в том
числе, от квадратов факторов, у которых коэффициенты имеют разные знаки,
например, для “седловидной” поверхности. При этом, несмотря на то, что эта
поверхность явно нелинейная, результат опыта в центральной точке может
оказаться достаточно близким к полученному результату по неполному
квадратичному полиному плана ПФЭ. Однако расхождения будут возникать во всех
других точках плана эксперимента. Поэтому нецелесообразность использования
плана ПФЭ определяется нелинейностью каких-либо сечений поверхности отклика.
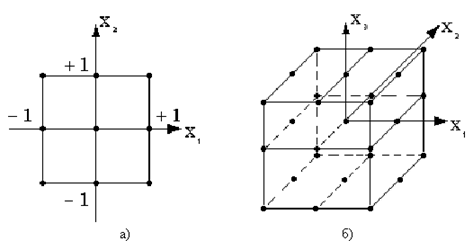
Косвенным признаком может служить расхождение Если не удается получить полином по плану ПФЭ, хорошо аппроксимирующей реальную поверхность, то какие пути можно предложить для повышения точности полиномов? Уменьшение диапазона варьирования факторов или его разбиение на поддиапазоны, для каждого из которых строится свой план ПФЭ и определяется свой полином. Путь достаточно трудоемок, но погрешность семейства планов ПФЭ снижается. Выделение фактора, порождающий нелинейность, и построение для оставшихся n–1 факторов k планов ПФЭ, в каждом из которых выделенный фактор зафиксирован при некотором значении. На основе полученных k полиномов можно попытаться сформировать общий полином, коэффициенты которого являются функциями выделенного фактора. Этот путь также достаточно трудоемок. Переход к плану ПФЭ с большим числом уровней варьирования факторов, например к планам с варьированием факторов на трех уровнях - планам ПФЭ 3n (рис. 12). В этом случае происходит резкое увеличение количества точек по сравнению с планом ПФЭ 2n . Так при n = 2 для ПФЭ 2n N=4, для ПФЭ 3n N=9; при n = 3 для ПФЭ 2n N=8, для ПФЭ 3n N=27; при n = 4 для ПФЭ 2n N=16, для ПФЭ 3n N=81 и т.д.
Рис. 12. Планы ПФЭ 32 (а) и ПФЭ 33 (б) Достраивание планов ПФЭ 2n до планов более высокого порядка (чаще всего второго) и построение полных квадратичных полиномов (с наличием квадратов факторов). Преобразование метрики матричного пространства, то есть переход к новым факторам функционально связанным с прежними факторами, но не порождающими нелинейности. Лекция 7. Планы второго порядка Они позволяют сформировать функцию отклика в виде полного квадратичного полинома, который содержит большее число членов, чем неполный квадратичный полином, сформированный по планам первого порядка, и поэтому требуют большего числа выполняемых опытов. Полный квадратичный полином при n =2 содержит 6 членов
при n = 3 - 11 членов
Известно, что для получения квадратичной зависимости каждый фактор должен фиксироваться как минимум на трех уровнях. Для планов второго порядка область планирования может: Быть естественной, то есть включать область планирования планов первого порядка и дополнительные точки (такие планы называются композиционными). Дополнительные точки могут выходить за область плана первого порядка – единичного гиперкуба. В этом случае опыты в них реализуются при установлении факторов за пределами варьирования. Это надо учитывать при определении области совместимости факторов. Не выходить за пределы
единичного гиперкуба, то есть для всех точек плана выполняется условие Не выходить за пределы
единичного гипершара, определяемую соотношением таких значений факторов в
плане, что Во втором и третьем случаях используют специальные приемы выполнения приведенных соотношений в плане. План с одной областью планирования можно перестроить в план другой областью планирования. Если уже был ранее сформирован план ПФЭ, но точность его функции отклика не удовлетворяет, то мы можем достроить этот план до плана второго порядка (композиционный план) и сформировать функцию отклика в виде полного квадратичного полинома, без потери информации о ранее сделанных опытах. Ортогональный центрально-композиционный план второго порядка Ортогональным планом называется такой план, у которого матрица планирования Х строится так, что бы матрица С=ХtХ оказалась диагональной. Используем этот подход и при построении планов второго порядка. План называется центральным, если все точки расположены симметрично относительно центра плана. ОЦКП – центральный симметричный ортогональный композиционный план. В ОЦКП входят: ядро -
план ПФЭ с N0= 2n точками плана, n0 (одна для этого плана) центральная точка
плана
При этом в каждой
плоскости, содержащей ось Y и координатную ось i-того фактора (проходящей через
центр плана), оказываются три значения фактора хi Общее количество точек в плане ОЦКП составляет
где для ОЦКП n0=1. При n > 2 в ОЦКП оказывается меньшее количество точек, чем в плане ПФЭ 3n . Число точек в плане
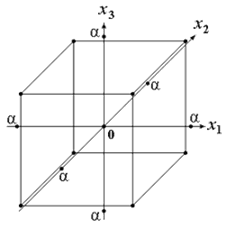
Графическое представление ОЦКП для n=3 приведено на рис. 13.
Рис. 13. ОЦКП при n=3 Для ортогонального плана необходимо, чтобы выполнялось соотношение
Так как
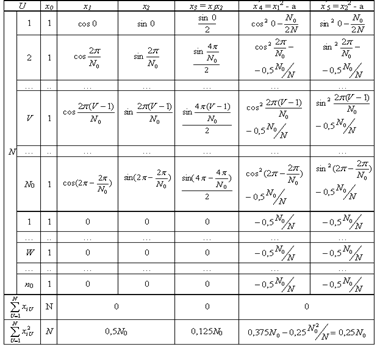
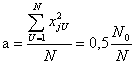
Это означает необходимость выполнения требования, чтобы сумма элементов любого столбца (кроме j=0), включая столбцы, соответствующие квадратам фактора, должна быть равна нулю. Это возможно, если члены столбцов, соответствующих квадратам факторов, преобразованы, иначе сумма квадратов факторов не может быть равна нулю. Преобразование элементов этих столбцов осуществляется в виде
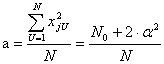
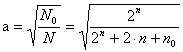
где а – величина, зависящая от числа факторов. Сумма элементов столбца, соответствующего квадратам факторов
Откуда
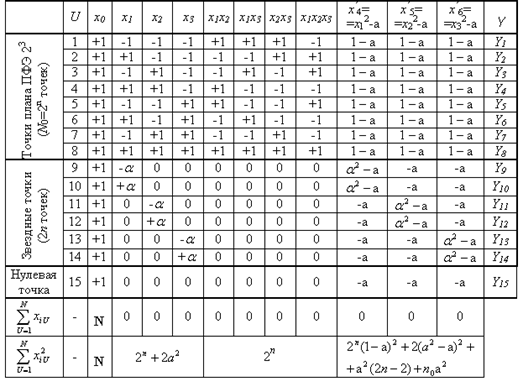
В общем случае ортогональный центрально-композиционный план при трех (n) факторов имеет следующий вид
В ОЦКП каждый фактор
фиксируется, в общем случае, на пяти уровнях (- Для определения неизвестных
а” и “
После простейших
преобразований с учетом того, что
Соотношение для а при j=1, 2 или 3 может быть записано как (см. план)
Подставив его в последнее уравнение получаем
откуда константа преобразования а
Тогда
и плечо звездных точек
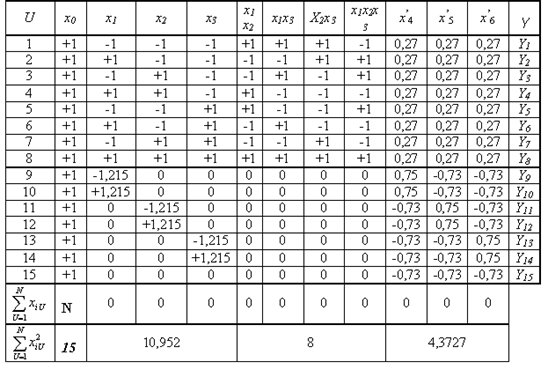
Например, для ОЦКП при числе факторов n=3 имеем следующие параметры плана
Сам план принимает вид
Очевидно, что план является ортогональным. В отличие от планов ПФЭ для ОЦКП сумма квадратов факторов разных столбцов не является одинаковой. По результатам опытов плана формируется полином
Коэффициенты полинома
Можно преобразовать полином к виду
где
Значения параметров ОЦКП при числе факторов n
При n =2 ОЦКП совпадает с планом ПФЭ 23. Звездные точки ОЦКП в этом случае лежат на границах варьирования факторов. Если точки плана ПФЭ 2n всегда лежат на окружности (поверхности шара, гипершара), то точки плана ОЦКП не лежат на какой-либо одной окружности (поверхности шара, гипершара). План ОЦКП не является насыщенным. Так, например, для n = 3 полином имеет одиннадцать членов со своими коэффициентами, но для их определения используются пятнадцать опытов. Пример плана ОЦКП для n = 2. Параметры плана N0=4,
N=9,
Коэффициенты полинома составляют
Полином принимает вид
(Ранее по плану ПФЭ 22
был сформирован полином Рассчитанные значения Лекция 8. Рототабельные планы Рототабельные планы – это планы, у которых точки плана располагаются на окружностях (сферах, гиперсферах). У рототабельного плана первого порядка точки плана располагаются на одной окружности (сфере, гиперсфере) с радиусом R
где V=1,…, N - номер точки плана, i =1,…, n – номер фактора. В таком случае точность оценивания функции отклика по любому направлению факторного пространства (для всех точек плана) одинаковая. Рототабельный план может быть симметричным, когда точки плана располагаются симметрично друг друга. Рассмотренный ранее план ПФЭ 2n – рототабельный симметричный план первого порядка. У рототабельных планов второго порядка точки плана располагаются на двух концентрических гиперсферах с радиусами R1 и R2 . В таких планах
для V =1,…, N0 и
для W=1,…, n0, где V и W – текущие номера точек плана в двух подмножествах опытов N0 и n0 из их общего количества N, относящихся к двум разным концентрическим сферам. Одна из сфер может быть вырожденной, когда R2=0. Рассмотренный ранее ортогональный центрально-композиционный план второго порядка (ОЦКП) не является рототабельным планом, так как его точки лежат на трех концентрических окружностях (сферах, гиперсферах). При n=2 это очевидно из рис. 14. “Звездные” точки плана и точки плана ПФЭ 2n лежат на разных окружностях.
Рис. 14. Расположение точек ОЦКП на трех окружностях Рототабельный план может быть ортогональным, если выполняется условие
где Рототабельный ортогональный центрально-композиционный план Рототабельный ортогональный
центрально-композиционный план (РОЦКП) строится аналогично рассмотренному ранее
ОЦКП. К использованному в качестве ядра плану ПФЭ 2n добавляются “звездные
точки - по две на каждый фактор и несколько точек в центре плана. “Звездные
точки должны располагаться на поверхности гиперсферы с радиусом R, на которой
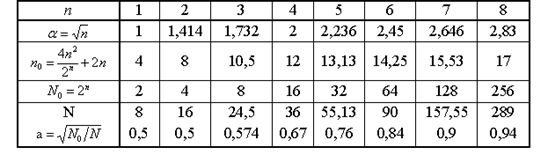
лежат и точки плана ПФЭ 2n, то есть величина плеча “звездных” точек Радиус сферы, на которой
лежат точки плана ПФЭ 2n при двух уровнях варьирования факторов с диапазоном
Рис. 15. Радиус окружности (сферы), на которой лежат точки плана ПФЭ 2n при диапазоне варьирования факторов от –1 до +1: а) - n=1, б) - n=2, в) - n=3,
Таким образом, при построении РОЦКП с ядром из плана ПФЭ 2n плечо “звездных” точек определяется числом факторов
Раннее при определении параметров ортогонального композиционного плана второго порядка с ядром из плана ПФЭ 2n было получено
где
В этом случае для РОЦКП число наблюдений в центре плана
Если n0 не целое, то при практическом построении плана его округляют до целого, но свойство ортогональности плана нарушается. Параметры РОЦКП в зависимости от числа факторов
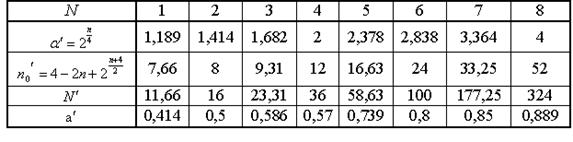
В [1] без вывода для РОЦКП рекомендуется принимать
Тогда
Параметры РОЦКП по [1]
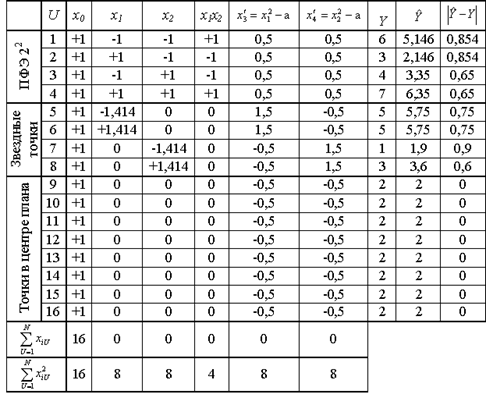
Пример рототабельного ортогонального центрально-композиционного плана для n = 2. Параметры плана:
Нет необходимости проводить восемь раз (точки с 9 по 16) опыты в центре плана. Достаточно провести этот опыт один раз и записать результат во все восемь строк. Строки сокращать нельзя, так как нарушается свойство ортогональности, и коэффициенты полинома будут определены неверно. Коэффициенты квадратичного полинома рассчитаются, как и ранее. Использован рассмотренный ранее план ПФЭ 22 с добавленными опытами 5-16.
Полином принимает вид
Рассчитанные значения функции и расхождения с опытными данными представлены в предпоследнем и последнем столбцах плана. Ранее для ОЦКП, при несколько отличающейся поверхности функции, был получен близкий полином в виде
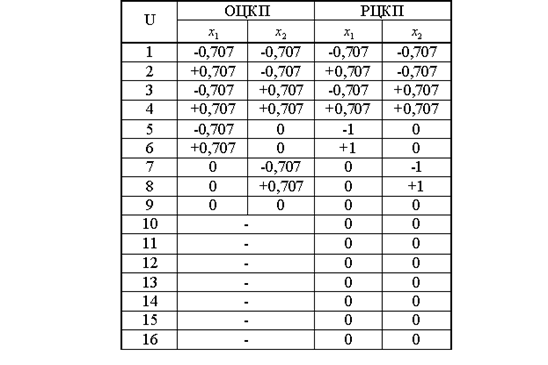
Для n=2 число членов квадратичного полинома составляет шесть. В ОЦКП и РОЦКП необходимо провести девять отличающихся опытов при пяти уровнях варьирования факторов. Поэтому ОЦКП и РОЦКП - ненасыщенные планы. Такое число экспериментальных точек может быть использовано для построения, например, кубичных полиномов. Лекция 9. Планы второго порядка с единичной областью планирования Так как ОЦКП и РОЦКП - композиционные планы, то при естественной области планирования “звездные” точки могут выходить за пределы единичного гиперкуба и единичного гипершара. Для вписывания плана в область единичного гипершара необходимо изменить значение факторов путем умножения их на коэффициент
Так при
Значение факторов в ОЦКП и РОЦКП при переходе от естественной области планирования к единичному гипершару, при n = 2.
Могут использоваться рототабельные планы с точками плана в вершинах других, кроме квадрата (куба, суперкуба), правильных многогранников, вписанных в область единичного круга (шара, гипершара). В рототабельном плане на основе N0-угольника присутствуют N0 отличающихся точек на окружности, с радиусом R1=1, и n0 совпадающих точек в центре плана, с радиусом R2=0. При n=2 для квадратичного полинома при шести его членах число отличающихся точек плана должно быть не менее шести. В планах на основе пятиугольника (шестиугольника или семиугольника) присутствуют 6 (7 или 8) отличающихся точек, что меньше чем в ОЦКП и РОЦКП, у которых 9 отличающихся точек. При соответствующем выборе многоугольника можно сформировать насыщенный рототабельный план второго порядка. Значения факторов в точках плана определяются типом многоугольника. Рототабельный план на основе правильного многоугольника при n=2.
Константа преобразования элементов столбцов, соответствующих квадратам факторов, для всех подобных планов составляет
Смотри, например, для столбцы i= 1 или 2 приведенного плана. Соотношение
После несложных преобразований оно сводится к требованию
что выполняется при условии в таких планах
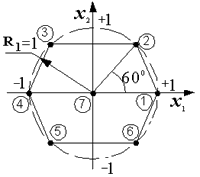
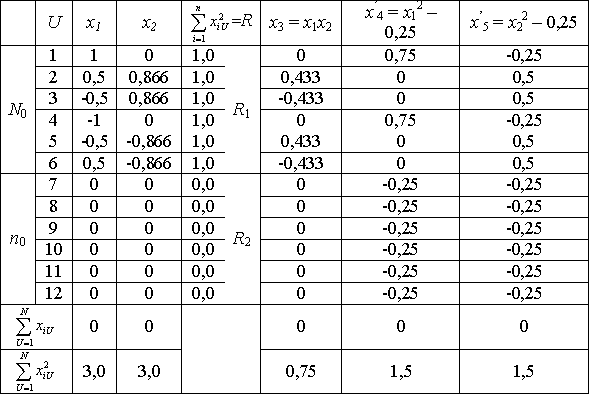
и следовательно N0=n0=0,5N . Таким образом число точек в центре плана для всех подобных планов равно числу точек на поверхности единичного гипершара и определяется типом использованного многогранника. Константа преобразования для всех подобных планов составляет а=0,25. Например, в рототабельном плане при n=2 на основе правильного шестиугольника присутствуют 7 отличающихся точек: N0=6 точек на единичной окружности и n0=6 совпадающих точек в центре плана (рис. 16).
Рис. 16. Рототабельный план при n =2 на основе правильного шестиугольника Здесь при построении плана первый фактор варьируется на пяти уровнях, а второй – на трех уровнях. Рототабельный план при n=2 на основе шестиугольника
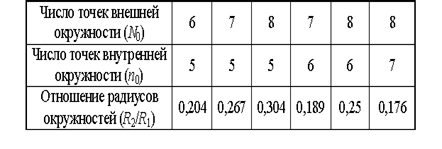
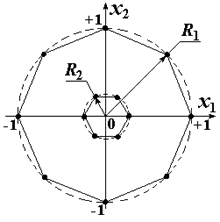
Существуют рототабельные планы, где оба радиуса не нулевые. При этом количество точек на каждой поверхности и отношение радиусов связаны. Числа точек окружностей рототабельного плана и отношение их радиусов
Пример такого плана при n=2, N0=8, n0=6, R2 / R1=0,25
Рис. 17. Рототабельный план с двумя невырожденными окружностями. |

 .
.
 .
.
 .
.
 ;
; ;
; .
.
 ,
, .
. .
. .
.

 .
.
 ;
; ;
; .
.
 .
. .
. .
.
 .
.
 .
. .
.
 .
. .
.
 ;
;

 .
.
 .
.
|
|
| 17.06.2012 |
| Большое обновление Большой Научной Библиотеки |
| 12.06.2012 |
| Конкурс в самом разгаре не пропустите Новости |
| 08.06.2012 |
| Мы проводим опрос, а также небольшой конкурс |
| 05.06.2012 |
| Сена дизайна и структуры сайта научной библиотеки |
| 04.06.2012 |
| Переезд на новый хостинг |
| 30.05.2012 |
| Работа над улучшением структуры сайта научной библиотеки |
| 27.05.2012 |
| Работа над новым дизайном сайта библиотеки |